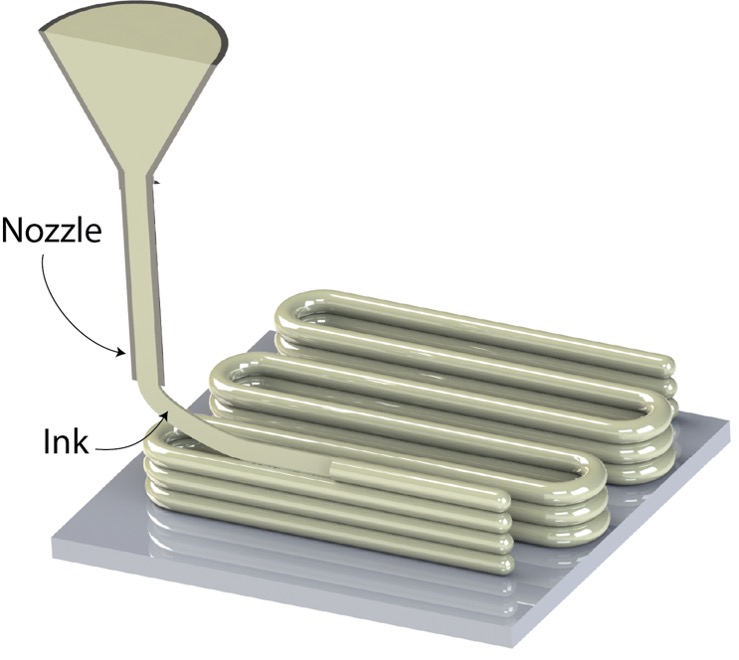
There are two most common base modalities to produce a back force to move the piston head which pushes ink through the syringe and nozzle:
- pressurized air (pneumatic system: prescribed back-pressure)
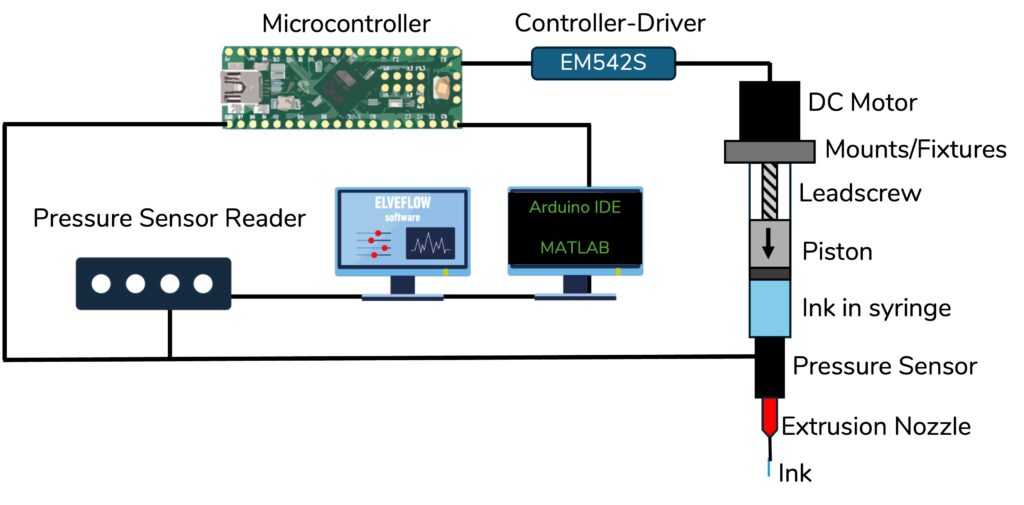
- motor-driven lead screw (positive displacement system: prescribed piston velocity).
Both have their drawbacks in terms of performance, especially when printing with compressible inks. Indeed, compressible inks change in volume when a pressure is applied to them in a closed space (such as the syringe), which means some of the energy applied by the piston is lost to compressing instead of extruding the ink. Pressure-based printing requires in-depth optimization prior to printing to determine the rheological complexities and pressure-to-flow rate relationship of each ink, and velocity-driven printing harbors very slow response to ink transients which makes printing with micro-nozzles impractical on a reasonable timescale.
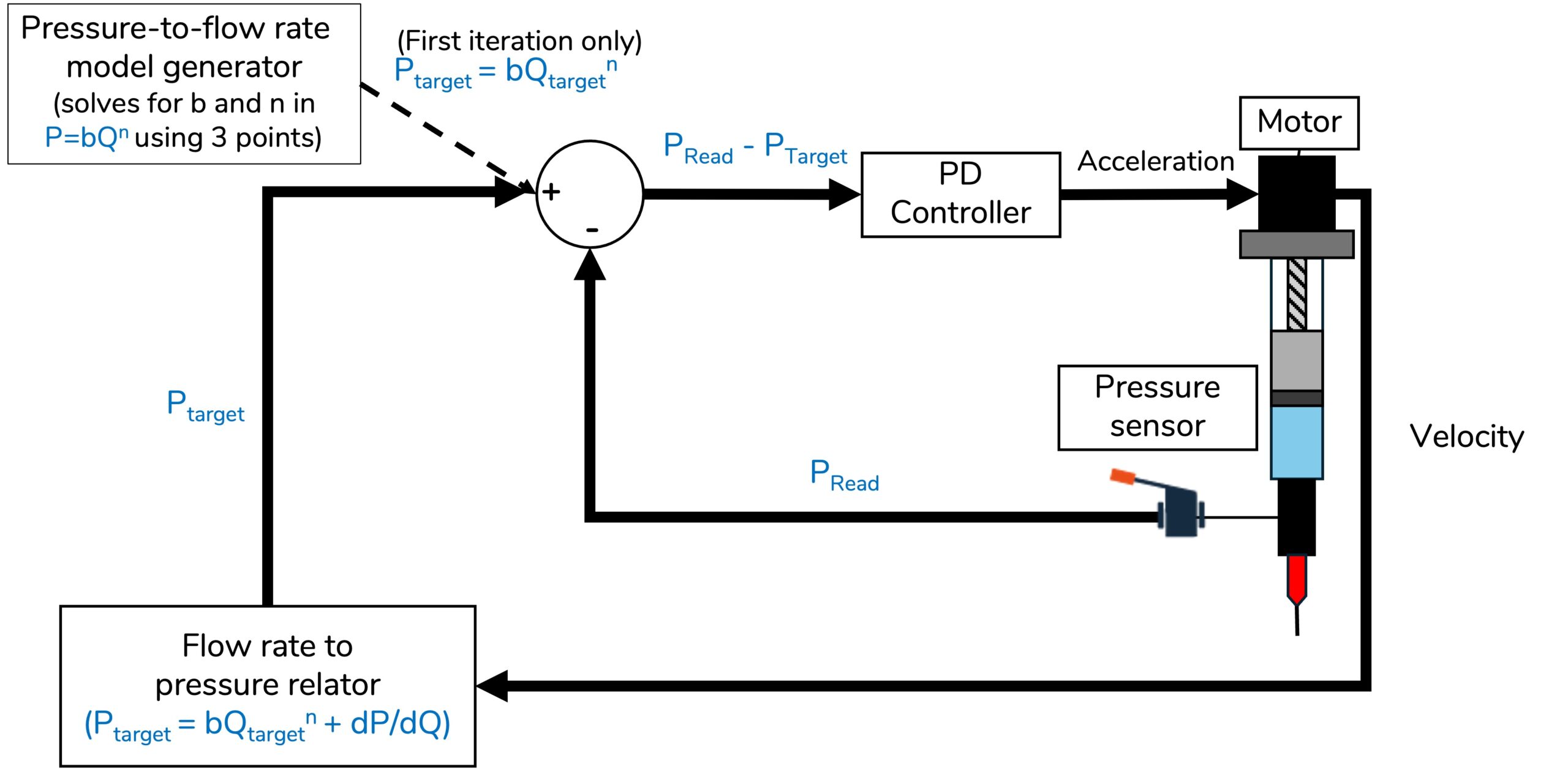
Iterative learning techniques have become prevalent in recent years, and here [2] we apply this principle to DIW to effectively combine pressure-based and velocity-based printing to more accurately control ink volume flow rate and therefore final printed part shape fidelity.
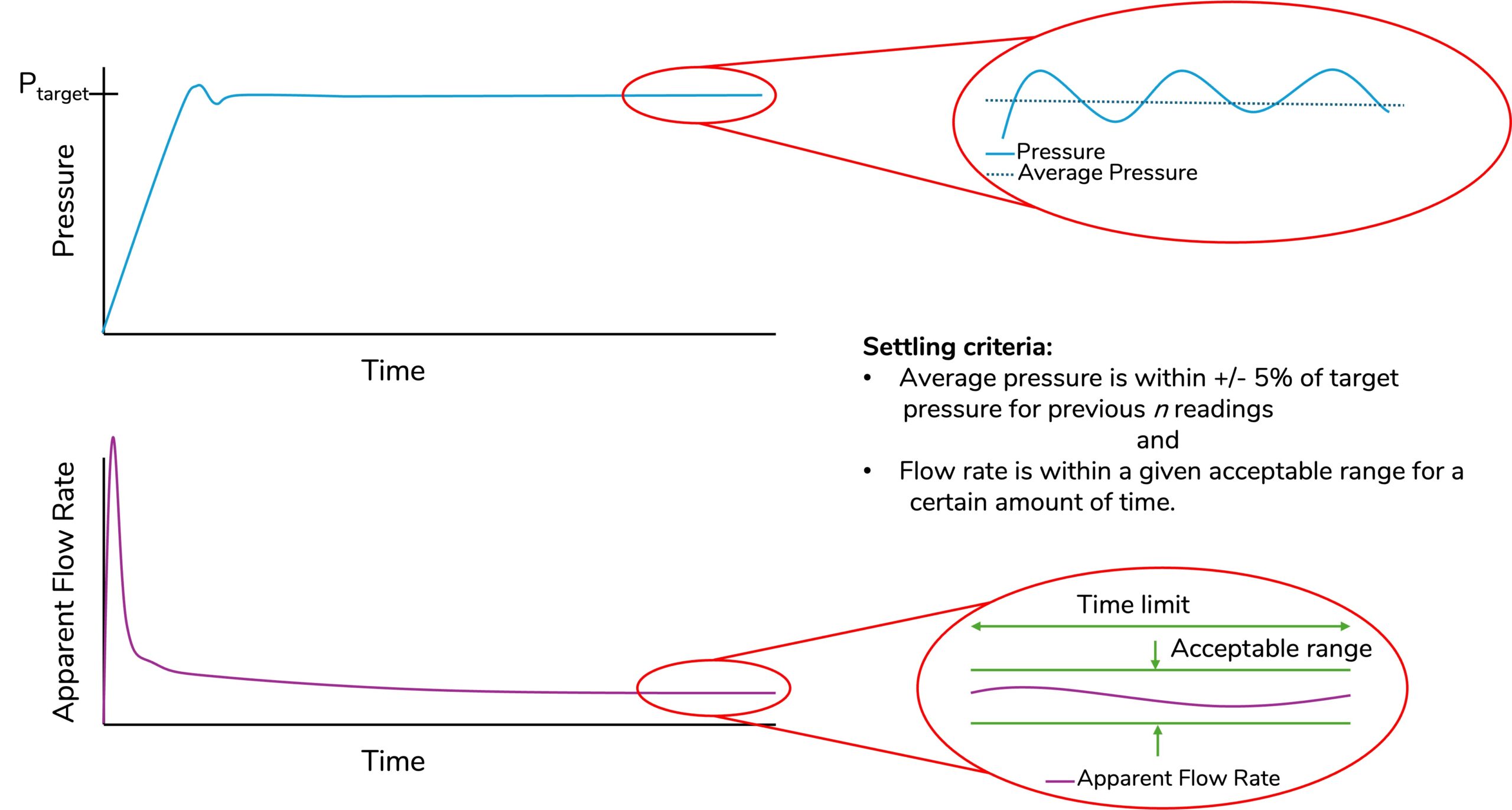
This can be performed with automatic settling-detection of transients and material model generation followed by model updates during extrusion via a closed-loop control method involving velocity feedback from the motor controller and pressure feedback from the Elveflow sensor.

 Job
Job Collaborations
Collaborations Customer
Customer Other
Other